Công nghệ sóng siêu âm
Đầu dò siêu âm tạo ra sóng siêu âm như thế nào
Các ứng dụng của công nghệ siêu âm có thể được nhóm lại thành hai loại: cảm biến và truyền động. Các ứng dụng cảm biến bao gồm hình ảnh siêu âm, sóng siêu âm và phát hiện chất lỏng. Các ứng dụng này thường yêu cầu cả truyền và nhận xung. Riêng với bể làm sạch bằng sóng siêu âm, chúng hoạt động dựa trên nguyên lý truyền động, yêu cầu tạo ra rung động siêu âm công suất cao liên tục hoặc bán liên tục. Vậy, truyền động siêu âm là gì và nguyên lý hoạt động của đầu dò siêu âm như thế nào để làm sạch được đồ dùng? VietSkymen sẽ bật lý ngay sau đây.
Thiết bị truyền động siêu âm là gì?
Loại thiết bị truyền động siêu âm phổ biến nhất là đầu dò Langevin kẹp bu lông (như hình dưới). Các thiết bị truyền động này bao gồm các đĩa áp điện được kẹp giữa các điện cực kim loại. Bu lông trung tâm chịu tải trước kết cấu với một lực nén đủ để ngăn cản lực kéo trong quá trình vận hành. Lỗ trung tâm có ren cũng được sử dụng để gắn đầu dò lên tải hoặc còi tập trung.
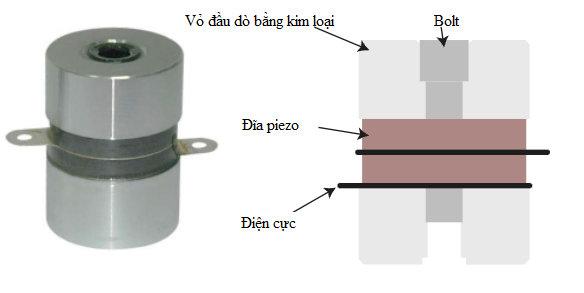
Đầu dò Langevin kẹp bu lông với hai lớp áp điện
Khi đặt một hiệu điện thế vào các lớp áp điện, một lực tỷ lệ thuận sinh ra theo phương thẳng đứng làm dịch chuyển hai đầu kim loại. Khi được gắn vào một bề mặt, hoạt động của đầu dò Langevin có thể được biểu thị bằng hệ thống tham số gộp được hiển thị bên dưới. Trong mô hình này, F đại diện cho lực áp điện, k là độ cứng của các lớp áp điện song song với bu lông tải trước, và C là giảm xóc nhớt của hệ thống. Hệ thống này có tần số cộng hưởng:
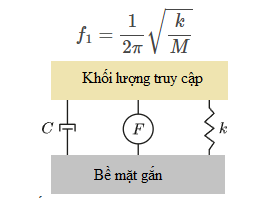
Mô hình cơ học hiển thị khối lượng tương đương, độ cứng k, tiêu tán C và buộc F
Động lực học cơ học
Trong hình dưới, trở kháng đầu cuối của bộ chuyển đổi được vẽ với đáp ứng tần số cơ học. Hàm truyền cơ học được biểu diễn bằng hệ thống bậc hai:
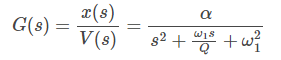
Trong đó:
- x là sự dịch chuyển,
- α là độ nhạy của đầu dò,
- Q là yếu tố chất lượng,
-
 là tần số cộng hưởng.
là tần số cộng hưởng.
Yếu tố chất lượng Q xác định băng thông hệ thống và độ lợi khi cộng hưởng so với độ dịch chuyển tĩnh. Yếu tố chất lượng có liên quan đến sự tiêu tán cơ họcCbằng phương trình:
![]()
Độ nhạy khi cộng hưởng xấp xỉ ![]() . Đó là, tổn thất cơ học cao hơn C, làm giảm hệ số chất lượng và biên độ dao động khi cộng hưởng.
. Đó là, tổn thất cơ học cao hơn C, làm giảm hệ số chất lượng và biên độ dao động khi cộng hưởng.
Khi đầu dò được kết hợp với tải cơ học, sự tiêu tán C trở thành tổng của sự tiêu tán bộ truyền động bên trong và sự tiêu tán của tải cơ học Cext đại diện cho công suất cơ học thực được cung cấp cho tải. Hầu hết các thiết bị truyền động siêu âm được thiết kế sao cho sự tiêu tán bị chi phối bởi công việc bên ngoài được giao cho tải. Vì độ dịch chuyển lúc cộng hưởng tỷ lệ nghịch với độ tiêu biếnC, những thay đổi lớn về biên độ dao động có thể là kết quả của sự thay đổi trong tiêu tán công suất tải.
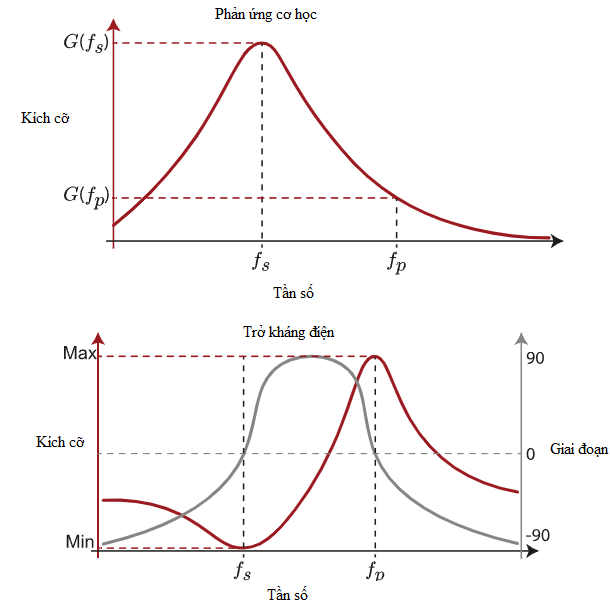
Phản ứng điện và cơ học của đầu dò siêu âm
Mô hình cộng hưởng chuỗi
Đáp ứng điện bị chi phối bởi cực tiểu trở kháng tại fs1, được gọi là cộng hưởng nối tiếp, gần bằng tần số cộng hưởng cơ học âm f1≈fs . Gần tần số cộng hưởng, một thiết bị truyền động siêu âm có thể được mô hình hóa một cách đầy đủ như là mạch tương đương chuỗi được hiển thị bên dưới, được gọi là mô hình Butterworth Van-Dyke. Mô hình này bao gồm một phần điện đại diện cho điện dung của bộ chuyển đổi và một mạch tương đương biểu thị phản ứng cơ học của bộ chuyển đổi. Mối quan hệ giữa đại lượng điện và cơ là:
- Vôn V tỷ lệ với lực F
- Hiện hành Im tỷ lệ với vận tốc x˙
- Điện cảm L1 tỷ lệ với khối lượng M
- Chống lại R1 tỷ lệ với sự tiêu tán C
- Điện dung C1 tỷ lệ nghịch với độ cứng k
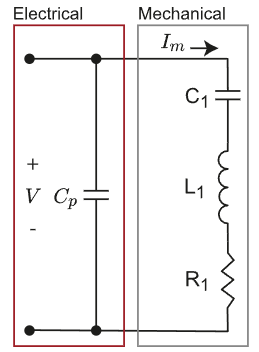
Mạch tương đương nối tiếp có giá trị gần tần số cộng hưởng nối tiếp
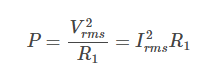
Ở tần số cộng hưởng nối tiếp, điện kháng của C1 và L1 tổng bằng không, chỉ để lại điện trở R1. Do đó, khi cộng hưởng, tổng công suất cung cấp cho đầu dò là:
Cần lưu ý rằng sức đề kháng R1 tỷ lệ thuận với tản nhiệt bao gồm tản nhiệt bên trong và bên ngoài. Những thay đổi lớn về biên độ và công suất có thể xảy ra với những thay đổi tương đối nhỏ về tiêu tán cơ học. Ví dụ: hãy xem xét một đầu dò siêu âm điều khiển điện áp có điện trở tải là R1=20Ω. Nếu hệ thống được truyền động ở trạng thái cộng hưởng và tải được loại bỏ, thì điện trở tương đương có thể giảm xuống 2Ω điều này sẽ làm tăng khả năng tiêu tán công suất lên một hệ số 10; hơn nữa, sự tiêu tán công suất này sẽ xảy ra trong bộ truyền động dưới dạng nhiệt.
Trong hoạt động cộng hưởng nối tiếp, điện áp tỷ lệ với lực phát triển và dòng điện tỷ lệ với vận tốc. Do đó, kích thích dòng điện không đổi cung cấp biên độ dao động xấp xỉ không đổi. Trong các ổ đĩa công suất cao, việc thực hiện trực tiếp nguồn dòng điện không đổi ít thực tế hơn nguồn điện áp. Tuy nhiên, một nguồn điện áp có thể được thực hiện với sự điều chỉnh phản hồi của dòng tải. Chủ đề này được thảo luận thêm trong “Kiểm soát nguồn điện”.
Mô hình cộng hưởng song song
Ngoài hiện tượng cộng hưởng nối tiếp, phản ứng điện còn thể hiện cực đại trở kháng, được gọi là cộng hưởng song song. Tại cộng hưởng song song, mạch tương đương là mạch kép của mô hình Butterworth Van-Dyke, như được minh họa bên dưới. Mối quan hệ giữa đại lượng điện và cơ là:
- Vôn Vm tỷ lệ với vận tốc x˙
- Hiện hành I ỷ lệ với lực F
- Điện cảm L2 tỷ lệ nghịch với độ cứng k
- Chống lại R2 tỷ lệ nghịch với độ tiêu tán C
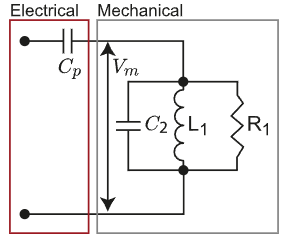
Đoạn mạch tương đương song song có giá trị gần tần số cộng hưởng song song
Ở tần số cộng hưởng song song, cuộn cảm cộng hưởng với điện dung của bộ biến đổi, và trở kháng lại trở thành điện trở R2 tuy nhiên, với giá trị lớn hơn nhiều so với R1. Nó có thể được chỉ ra rằng hiệu quả Q hệ số của cộng hưởng song song fp thấp hơn nhiều so với cộng hưởng nối tiếp. Lý do có thể được quan sát trong đáp ứng tần số cơ học. Tần số cộng hưởng song song cao hơn đáng kể so với tần số cộng hưởng cơ học. Có thể quan sát thấy rằng độ dốc của |G(jω)| thấp hơn nhiều ở fp, do đó, các biến thể về tần số cộng hưởng và sự tiêu tán có ảnh hưởng nhỏ hơn nhiều đến biên độ dao động. Do đó, hoạt động ở cộng hưởng song song rất phù hợp với các ứng dụng mà biên độ dao động không đổi được mong muốn với độ nhạy giảm đối với sự thay đổi của tần số cộng hưởng và sự tiêu tán tải.
Một nhược điểm của cộng hưởng song song là trở kháng hoạt động cao hơn đáng kể, đòi hỏi điện áp cao hơn để đạt được biên độ và công suất dao động giống hệt nhau. Mặc dù hiệu suất và công suất đầu ra tối đa là giống nhau, nhưng điện áp cao hơn có thể yêu cầu các biện pháp phòng ngừa an toàn cao hơn. Một bất lợi nữa là cần có trình điều khiển sóng sin thuần túy. Bất kỳ sóng hài nào trong tín hiệu biến tần sẽ gặp trở kháng thấp dẫn đến dòng điện phản kháng lớn.
Trong hoạt động cộng hưởng song song, điện áp tỷ lệ với vận tốc. Do đó, một ổ đĩa điện áp không đổi cung cấp biên độ dao động xấp xỉ không đổi.
So sánh tần số hoạt động nối tiếp và song song
Các đặc tính hoạt động của chuỗi và tần số cộng hưởng song song được so sánh trong bảng dưới đây. Mặc dù cả hai cấu hình đều đạt được công suất đầu ra giống hệt nhau, cộng hưởng nối tiếp yêu cầu điện áp thấp hơn nhưng dẫn đến tản nhiệt cao hơn trong bộ truyền động. Sự cộng hưởng song song cung cấp biên độ dao động không đổi với kích thích điện áp và ít làm nóng thiết bị truyền động hơn nhưng yêu cầu điện áp hoạt động cao hơn và trình điều khiển sóng sin.
| Cộng hưởng loạt | Cộng hưởng song song | |
| Trở kháng | Thấp, 20Ω | Cao, 400Ω |
| Điện áp yêu cầu | Thấp, 50 Vrms | Cao, 224 Vrms |
| Công suất tối đa | Giống hệt nhau, 125 W | Giống hệt nhau, 125 W |
| Loại trình điều khiển | Hình vuông, hoặc sóng hình sin | Sóng hình sin |
| Phù hợp nhất với các ứng dụng yêu cầu | Công suất cao (> 200W) | Độ chính xác cao |
| Ứng dụng mẫu | Làm sạch bằng sóng siêu âm | Gia công chính xác |
| Kích thích hiện tại liên tục dẫn đến | Vận tốc không đổi | Lực lượng không đổi |
| Kích thích điện áp không đổi dẫn đến | Lực lượng không đổi | Vận tốc không đổi |
| Tiêu tán tải cao hơn dẫn đến | Tăng sức đề kháng | Giảm sức đề kháng |
So sánh các điều kiện cộng hưởng nối tiếp và song song, với các đại lượng ví dụ
Theo dõi cộng hưởng
Một chức năng quan trọng của trình điều khiển siêu âm là xác định vị trí và theo dõi tần số cộng hưởng mong muốn. Đáp ứng thoáng qua nhanh là mong muốn để giảm thiểu độ trễ khởi động và bù đắp cho những thay đổi tải nhanh trong quá trình vận hành. Vì hầu hết các hệ thống siêu âm không có quyền truy cập trực tiếp để đo độ rung, nên việc theo dõi cộng hưởng được thực hiện bằng cách sử dụng trở kháng điện. Đề cập đến biểu đồ trở kháng điện, tần số cộng hưởng có thể được theo dõi bằng cách chỉ cần thay đổi tần số biến tần để tối đa hóa cường độ dòng điện. Hoặc, nếu hoạt động ở cộng hưởng song song, bằng cách giảm thiểu cường độ dòng điện. Một nhược điểm của phương pháp này là độ dốc trở kháng bằng không khi cộng hưởng, do đó, độ nhạy là nhỏ nhất tại điểm hoạt động mong muốn. Kết quả là, cách tiếp cận này dẫn đến độ lệch tần số lớn và phản hồi chậm. Hơn nữa, phương pháp này bị xáo trộn bởi những thay đổi trong tản tải làm thay đổi cường độ dòng điện một cách tự nhiên. Mặc dù có những nhược điểm, phương pháp này thực hiện đơn giản và có thể thích hợp cho các ứng dụng có điều kiện tải ổn định.
Theo dõi pha là một phương pháp thay thế trong đó tần số biến tần được thay đổi để buộc pha trở kháng về 0, xảy ra ở cả hai điều kiện cộng hưởng. Phương pháp này yêu cầu một bộ điều khiển phức tạp hơn nhưng nhanh hơn và chính xác hơn đáng kể so với các phương pháp khác vì độ dốc của đường cong pha là cực đại ở cả hai tần số cộng hưởng.
Một cân nhắc bổ sung với theo dõi pha là lựa chọn điểm đặt pha. Điều này có thể được chọn để hoạt động trên hoặc dưới cộng hưởng một chút, có thể cung cấp khả năng miễn nhiễm cao hơn đối với các biến thể tải với chi phí hiệu quả điện. Hơn nữa, các hệ thống có hệ số chất lượng thấp có thể có đáp ứng pha khác 0 khi cộng hưởng, đặc biệt là đối với cộng hưởng song song. Trong những trường hợp như vậy, một phản ứng trở kháng cần được thực hiện để xác định điểm hoạt động mong muốn.
Một ví dụ về triển khai điều khiển pha trong trình điều khiển PDUS210 được mô tả trong sơ đồ bên dưới. Một bộ tách sóng pha được sử dụng để đo góc pha trở kháng tải từ điện áp và dòng điện sơ cấp. Bộ điều khiển pha θref bằng cách điều khiển tần số của một dao động sóng hình sin.
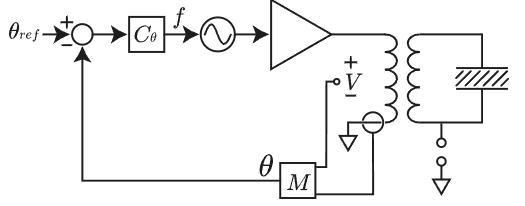
Vòng điều khiển pha trong trình điều khiển PDUS210
Kiểm soát biên độ rung
Để đạt được biên độ dao động không đổi, một đầu dò có thể được điều khiển với điện áp không đổi ở tần số cộng hưởng song song hoặc dòng điện không đổi ở tần số cộng hưởng nối tiếp.
Trong các ứng dụng công suất cao, dòng điện không đổi đạt được với vòng phản hồi được minh họa bên dưới. Trong chế độ này, mục tiêu chính là điều chỉnh dòng điện, tiếp theo là theo dõi pha.
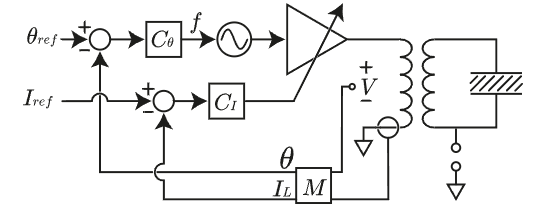
Vòng điều khiển hiện tại trong trình điều khiển PDUS210
Kiểm soát nguồn điện
Khi hoạt động với biên độ dao động không đổi, không có sự kiểm soát về mức độ tiêu hao công suất của bộ chuyển đổi hoặc cấp cho tải. Tuy nhiên, các trình điều khiển như PDUS210 cho phép đặt giới hạn công suất tối đa bất kể chế độ hoạt động.
Trong nhiều ứng dụng, người ta mong muốn điều chỉnh trực tiếp công suất tải vì điều này tỷ lệ thuận với các cân nhắc như hệ thống sưởi và tạo rãnh. Như thể hiện trong sơ đồ dưới đây, vòng điều khiển công suất thay đổi điện áp kích từ để duy trì công suất tải không đổi. Trong các ứng dụng như gia công siêu âm nơi dao tiếp xúc không liên tục với chi tiết gia công, vòng điều khiển công suất bị vô hiệu hóa tốt nhất trong khi chạy dao không tải. Điều khiển công suất được kết hợp hiệu quả nhất với kích thích dòng điện không đổi trong khi hoạt động ở cộng hưởng nối tiếp, hoặc kích thích điện áp không đổi khi hoạt động ở cộng hưởng song song.
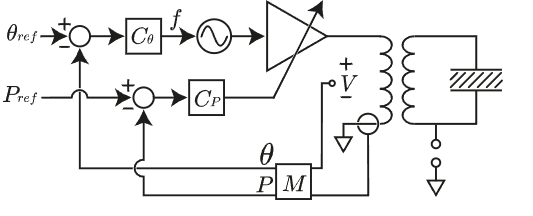
Vòng điều khiển pha và công suất trong trình điều khiển PDUS210
Một tùy chọn thứ ba để điều khiển công suất là điều chỉnh cường độ dòng điện đến một điểm đặt. Điều này rất hữu ích trong các ứng dụng cộng hưởng nối tiếp vì dòng điện tỷ lệ với vận tốc.
Chọn dải điện áp
PDUS210 có sẵn trong dải điện áp từ 17 Vrms đến 282 Vrms, tương ứng với trở kháng khác nhau, từ 1,5Ωđến 400Ω. Sự lựa chọn tối ưu được xác định bởi trở kháng của bộ chuyển đổi khi cộng hưởng và sự lựa chọn cộng hưởng nối tiếp hoặc song song.
Bước đầu tiên là đo trở kháng của bộ chuyển đổi ở mức cộng hưởng nối tiếp và song song. Điều này có thể được thực hiện bằng máy phân tích trở kháng hoặc đơn giản là máy tạo tín hiệu và máy hiện sóng.
Cộng hưởng
nối tiếp Để hoạt động ở cộng hưởng nối tiếp, bộ khuếch đại phù hợp nhất có trở kháng tối ưu gần bằng hoặc lớn hơn một chút so với trở kháng được tải đầy đủ. Vì trở kháng của bộ chuyển đổi có xu hướng tăng theo công suất sử dụng, nên bộ khuếch đại có trở kháng tối ưu cao hơn được khuyến nghị. Nếu bộ khuếch đại có trở kháng tối ưu cao hơn tải, giới hạn dòng điện sẽ đạt trước giới hạn điện áp và công suất đầu ra tối đa có thể đạt được là:
![]()
Trong đó, Irms là trình điều khiển tối đa hiện tại
Cộng hưởng song song
Để hoạt động ở cộng hưởng song song, bộ khuếch đại phù hợp nhất có trở kháng tối ưu gần bằng hoặc nhỏ hơn một chút so với trở kháng được tải đầy đủ. Vì trở kháng của bộ chuyển đổi có xu hướng giảm theo công suất sử dụng, nên bộ khuếch đại có trở kháng tối ưu thấp hơn được khuyến nghị. Nếu bộ khuếch đại có trở kháng tối ưu thấp hơn tải, giới hạn điện áp sẽ đạt trước giới hạn dòng điện và công suất đầu ra tối đa có thể đạt được là:
Trong đó, Vrms là trình điều khiển tối đa .